
Artículo escrito por Carlos Ganado Alcocer, ingeniero aeronáutico.
La definición más general de drone (o dron) es la siguiente: vehículo volador más pesado que el aire (no se incluyen aquí los globos o zepelines) no tripulado y teledirigido por ondas electromagnéticas (ya sean provenientes de un satélite o de un mando teledirigido). El término parece muy moderno, sin embargo, las bombas V-1 y V-2 de la segunda guerra mundial ya se denominaban así (Mayor Seversky: “el poder aéreo, clave de la supervivencia”). Otro nombre para el mismo significativo es el de UAV (unmanned aerial vehicle), quizás más utilizado en terminología militar.
En el presente artículo nos centraremos en los drones de ala giratoria, y en particular en los de tres o más motores, dado que son las aeronaves más novedosas y prácticamente los aviones (ala fija) y helicópteros teledirigidos no presentan diferencias en cuanto a actuaciones en vuelo respecto a sus homólogos tripulados. Además, dichos drones son un valor en auge, al menos en la industria juguetera, dado que han sido el regalo estrella de las navidades 2014-2015.
Los drones que vamos a estudiar se distinguen por el número de motores que tengan y los más comunes (desde el punto de vista comercial) son: tricóptero, cuadricóptero, hexacóptero y octocóptero. El número de motores cambia el nombre pero no las actuaciones de la aeronave, simplemente tendrá más o menos potencia para moverse (en función también del tamaño de hélice que se utilice).

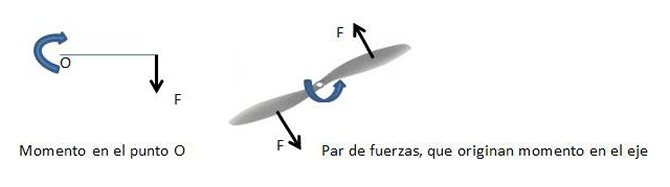
En primer lugar, es conveniente conocer el principio físico más importante que afecta a estos drones, que es el mismo que concierne a los helicópteros: el equilibrio de momentos. El momento se define en física como una fuerza por un brazo o longitud, dando lugar a un giro. También se llama “par” porque dos fuerzas diametralmente opuestas de sentidos contrarios y con brazos idénticos, dan lugar a que el sólido gire alrededor de un eje.
Una hélice rotando crea un momento igual y de sentido contrario que, por el principio de acción-reacción de Newton, si no se compensa de alguna forma, hace que la aeronave se halle en desequilibrio, esta es la razón por la cual, si en un helicóptero falla el rotor de cola o antipar, todo el fuselaje del helicóptero empezará a girar en sentido contrario a las palas, para compensar el par creado por el rotor principal.
En lo referente a equilibrio del par, los drones en estudio, solo se diferencian entre ellos en función de si el número de rotores es par o impar, por tanto, solo se estudiará el tricóptero y cuadricóptero y comenzaré por el último, por ser más sencillo.
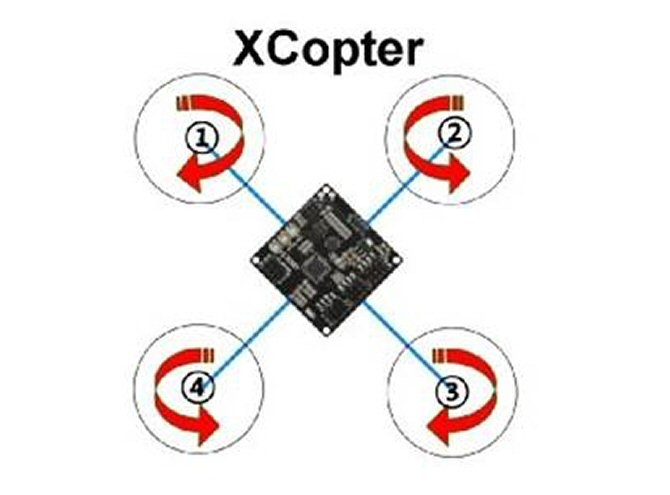
En un cuadricóptero se tienen 4 motores generando cada uno de ellos un par, que se transmite al centro de masas. De la misma forma que una fuerza se anula o equilibra con otra igual y de sentido contrario, un momento también se equilibra con otro de la misma magnitud y sentido contrario. Para conseguir el equilibrio de momentos, el sentido de rotación es el mismo en los motores diametralmente opuestos y justo el contrario en los otros de tal forma que en el centro se produce el equilibrio y la aeronave se mantiene estable. En otras palabras, en un cuadricóptero 2 hélices giran en un sentido y las otra 2 en el otro; en un hexacóptero tendremos 3 y 3; en un octocóptero 4 y 4.
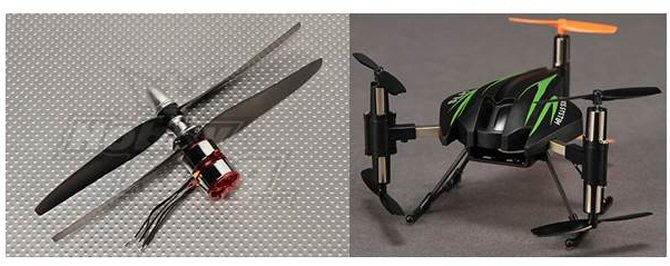
En un tricóptero, la situación es distinta. Ya no podemos compensar el par con parejas de motores girando en sentidos opuestos, porque faltaría siempre uno. Lo que se hace es una compensación del par, motor a motor, individualmente. El mecanismo es más complejo y consiste en poner dos hélices por motor, girando cada una en sentido opuesto a la otra, como se observa en las figuras siguientes. También se puede equilibrar el par haciendo que dos rotores giren en un sentido y el restante en el contrario pero con más potencia de tal forma que la suma de momentos en el centro de masas sea nula. Este segundo método requiere una electrónica algo más compleja, pero con la capacidad actual de programación, no es para nada inalcanzable.
El equilibrio de momentos es muy importante porque permite al drone volar de forma estable y pararse en el aire.
En este punto se estudiarán los distintos movimientos que puede hacer un drone en el aire:
• Ascenso vertical: todos los motores dan el mismo empuje y cuando su fuerza total vence al peso, el drone sube.
• Descenso vertical: todos los motores dan el mismo empuje pero para que la aeronave caiga, el empuje total debe ser inferior al peso (la diferencia será pequeña para que el descenso sea controlado)
• Movimiento frontal y trasero: en el caso de drones de número de rotores par, por ejemplo el cuadricóptero, para ir hacia delante los rotores de atrás dan más empuje que los de delante. Esto hace que el drone se incline hacia delante proporcionando una componente de fuerza propulsiva en esa dirección. Para ir hacia detrás serán los de delante los que den más potencia. En el caso de tricópteros se pueden tener dos configuraciones en función de lo que se considere delante y detrás en el drone. Así puede ocurrir que haya un rotor que dé más potencia que los otros dos, o bien, dos rotores que den más potencia que el restante.
• Movimiento lateral: en un cuadricóptero, estamos ante un subcaso del apartado anterior. Si se quiere desplazar el drone a la derecha habrá que dar más potencia sobre los rotores de la izquierda y viceversa. Si se quiere desplazar el drone en otra dirección cualesquiera, habrá que jugar con la potencia de cada rotor para conseguir el movimiento deseado. En el caso de los tricópteros, sería exactamente igual que en el caso de movimiento frontal, sólo que ahora se considera al frente, la dirección deseada.
• Giro alrededor del centro de masas del drone: en cuadricópteros, simplemente se da menos potencia a dos motores diametralmente opuestos para que se haga efectivo el momento creado por los otros dos motores, dando lugar a un giro en el sentido deseado. Al descender la potencia de la mitad de los motores puede ocurrir que la sustentación ahora sea inferior al peso y por esto, es muy frecuente perder altura en esta maniobra.
En el tricóptero el giro alrededor de centro de masas se consigue de forma diferente si cada motor tiene doble hélice o si es de hélice única.
En el primer caso, sencillamente se da más potencia a las hélices de arriba de todos los motores que a las de abajo o viceversa en función de si queremos la rotación en un sentido u otro.
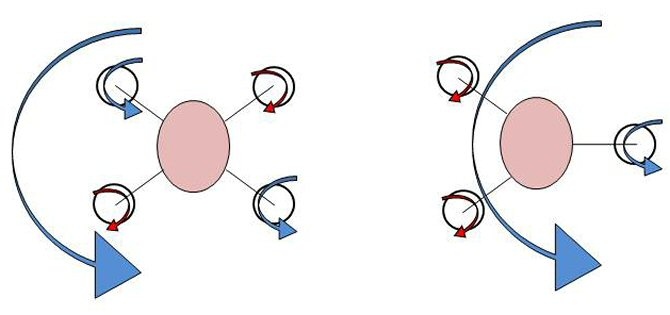
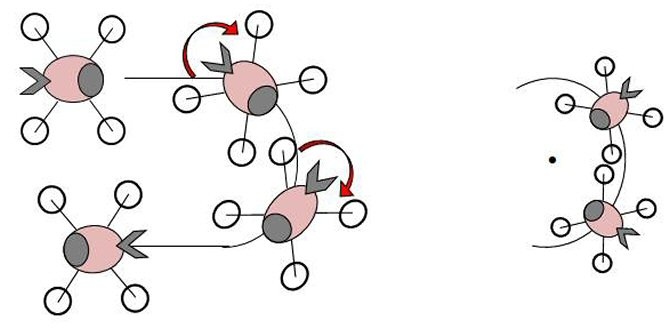
En el caso de tricópteros con motores de una sola hélice por rotor, se necesita un complejo sistema electrónico con programación para dar más potencia a un rotor en cada momento, cambiando continuamente de rotor para mantenerse en el mismo punto. En la siguiente figura se observa un cuadricóptero girando en sentido anti horario y un tricóptero que en función de la lógica que lleve su procesador girará en un sentido u otro según la potencia de cada rotor (en la figura lleva sentido anti horario pero podría ser horario).
• Viraje: este movimiento es combinación de otros dos movimientos: una rotación alrededor del centro de masas del drone (que se haría come se ha explicado en el punto anterior) y a la vez una rotación alrededor de otro eje distinto (este último movimiento en realidad consiste en un desplazamiento frontal, dar más potencia a los rotores traseros). De esta forma mientras se desplaza hacia delante, el drone está girando sobre sí mismo y describe un arco de circunferencia. El viraje exige ya cierta pericia por parte del piloto.
También se podría hacer el viraje, sin necesidad de que el drone rotase sobre sí mismo, en este caso el morro estaría continuamente apuntando al eje del viraje y se harían movimientos laterales infinitesimales y cambiando continuamente la dirección, para ir recorriendo el arco.
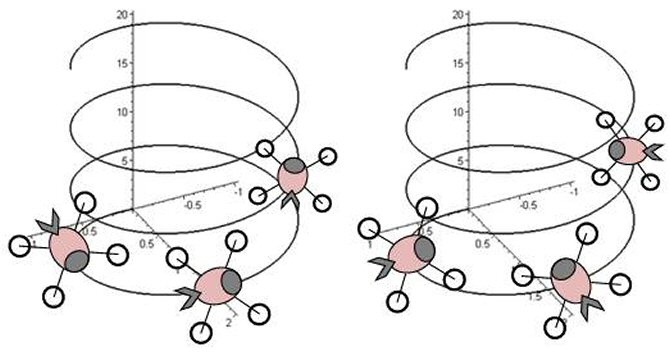
• Movimiento helicoidal: este movimiento es combinación del viraje (en sus dos versiones, con o sin rotación propia) más ascenso o descenso vertical, de tal forma que se describe una hélice, como se observa en la figura.
• Acrobacias: cuando se habla de acrobacias de un drone nos referimos a otro tipo de giro. En este caso sería alrededor del eje transversal y daría la vuelta entera (una voltereta). Para ello, en un instante diminuto de tiempo se paran los motores de delante y se da un empuje impulsivo a los de atrás, creando un gran momento alrededor del eje transversal que provoca la voltereta. Si se quiere una voltereta invertida solo hay que parar los motores traseros y dar el impulso extra con los delanteros.
También se podría hacer la misma pirueta lateral si jugamos de la misma forma tomando por parejas los rotores laterales (en este caso el giro sería alrededor del eje longitudinal del drone).
Por último podemos estudiar el giro alrededor de un eje diagonal, el que une dos rotores. En este caso se han de parar en ese instante infinitesimal de tiempo 3 rotores: los dos unidos en la diagonal de giro y otro más. El restante recibe el impulso y provoca el giro.
En los tricópteros es muy similar, se paran dos rotores y se impulsa con el tercero.
Los drones comerciales vienen preparados para realizar la acrobacia de manera muy sencilla, ya que la única indicación que hay que dar en el mando es la dirección de giro y presionar el botón de acrobacia. Este movimiento conviene hacerlo a cierta altura porque al pararse varios rotores, aunque sea durante un instante de tiempo, la sustentación cae mucho y el drone pierde altura.
Combinando todos estos movimientos se puede disfrutar de un rato de pilotaje del drone.
Una pregunta que probablemente el lector se haga puede ser: si el drone puede hacer exactamente lo mismo que el helicóptero, es decir, moverse en las tres dimensiones y quedarse quieto sobre un punto, ¿qué aporta el drone respecto del helicóptero?
La respuesta es sencilla, aparte de que el helicóptero no puede hacer las acrobacias (como mucho el looping, pero este no sería un giro sobre uno de sus propios ejes), el drone aporta:
• En primer lugar, una mayor estabilidad y maniobrabilidad.
• En segundo lugar, mayor sencillez mecánica. El helicóptero tiene un rotor principal articulado que para permitir todos los movimientos, necesita un mecanismo complejísimo.
• En tercer lugar, la propulsión obtenida para un mismo tamaño de hélice, es mayor. Aunque este no es un parámetro comparable, habría que comparar la propulsión del helicóptero equivalente.
Por otra parte los hándicaps de los drones son:
• El gran consumo de combustible, al tener que mover más rotores que el helicóptero, lo que se traduce en los drones de juguete por una autonomía que rara vez dura más de 15 minutos.
• Si en un futuro quisiéramos implementarlo a nivel de aeronave para transportar humanos habría que buscar un medio para reducir el ruido que afecta a la cabina.
Actualmente los drones se utilizan para la grabación aérea (dando unas tomas espectaculares), también se utilizan en la detección de grietas de edificios, inspección de aerogeneradores, seguimiento de manifestaciones o carreras populares y otros eventos deportivos, control de huertas, espionaje y usos recreativos de aeromodelismo y pilotaje. Las debilidades se hallan en la bajísima duración de las baterías y en que una pequeña ráfaga de viento, desestabiliza al drone y puede caer.
En dimensiones grandes, para transporte humano o de mercancías, es difícil que el cuadricóptero llegue a sustituir al helicóptero, porque a pesar de que el helicóptero necesita un rotor costosísimo, el precio de 3, 4 ó más hélices con sus respectivos mantenimientos, encarecerían mucho el valor del cuadricóptero tripulado, no obstante si el coste de las hélices y demás sistema propulsivo se redujera, dicha sustitución sería tan rápida como la que le devino a la carroza cuando se inventó el coche. A nivel de aeromodelismo, el drone ha superado por mucho al helicóptero y se justifica porque los materiales utilizados son muy baratos: 4, 10 e incluso 20 hélices son más baratas que el rotor articulado de un helicóptero. Sin embargo el paso a dimensiones grandes será más costoso por los requerimientos de seguridad que imponen las normas de certificación aeronáutica.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}